Nous allons poser les bases mécaniques du déplacement du corps dans l’espace.
En l’absence de mouvement deux forces s’appliquent au corps(fig.1) :
- Le poids (P) toujours vertical et orienté vers le centre de la terre.
Elle s’applique au centre de gravité du corps qu’on va fixer par convention en avant de la 4ème vertèbre Lombaire (L4). Sa valeur dépend de la masse du corps concerné et du champ de gravité à l’endroit étudié. - La réaction (R) du sol. Force variable, elle dépend des forces que le corps applique sur le sol.
Elle s’applique sur les points de contact du corps avec le sol (polygone de sustentation).

Figure 1 : Forces Appliqués au corps
Pour mettre en mouvement le corps il faut réussir à le faire accélérer. On va utiliser les lois du mouvement de Newton. Elles nous disent : que pour un corps de masse m l’accélération qu’il subit est proportionnelle à la résultante des forces qu’il subit et inversement proportionnelle à sa masse.
Sur le dessin ci-dessus la somme de P et de R est égale à zéro les deux forces s’annulent On veut que la somme des forces aient une résultante non nulle pour permettre une accélération (a) et ainsi initier le mouvement(fig2).
- On ne peut pas modifier la masse du corps donc P est constant.
- On ne peut agir que sur R. Par l’action des muscles on peut réduire ou augmenter la force que l’on applique sur le sol, ce qui va modifier la force résultante du sol sur nous(la réaction R). On peut aussi modifier son point d’application en changeant nos appui.

Figure 2:Résultante de la somme des forces
DEPLACER LE CENTRE DE GRAVITE VERS L’AVANT
Pour avancer il va falloir faire incliner la Réaction du sol vers l’avant. Pour cela on va par l’action musculaire changer les points d’appuis et créer une force horizontale dirigée vers l’arrière(Fig 3). Le point d’appui va être postériorisé par l’action du muscle Droit antérieur. La force horizontale est engendrée par les muscles Fessiers et les muscles Ischio-jambier(fig 4).

Figure 3 : Forces appliqués au corps au démarrage.

Figure 4 : Muscles du démarrage.
D’après les lois de Newton, après projection sur l’horizontale
![]()
ou Ph et Rh sont les composantes horizontales du poids et de la réaction. P étant strictement vertical, Ph est nul. Rh est égal à P divisé par tan(α) (fig5)
Soit
![]()
Sachant que plus α est proche de 0 plus tan(α) est grand on peut en conclure que plus α est proche de 0 (plus R s’approche de l’horizontale), plus l’accélération sera grande.

Figure 5 : calcul de la composante horizontale.
AMELIORER L’ACCÉLÉRATION INITIALE
Comme on la vu au dessus, pour augmenter l’accélération il faut réduire l’angle α. On peut agir sur deux points.
- Agir sur le point G : il va pouvoir être abaissé en fléchissant les genou et l’avancer à l’aplomb des orteils.
- Agir sur le point d’appui au sol : on a vu que pour créer l’accélération on a déjà postériorisé le point d’appui. On peut augmenter cela en reculant un pied.
Les limites de ces adaptations vont être notamment la limite de flexion dorsale de cheville et l’adhérence du pied au au sol.
Il est à noter qu’en avançant le centre de gravité on augmente la capacité d’accélération vers l’avant mais on réduit celle vers l’arrière.

Figure 6 : Amélioration de l’accélération initiale.
EFFICACITE DU DEPLACEMENT DANS LE CADRE MARTIAL
Dans le cadre martial, on va vouloir maximiser l’accélération et on va chercher à cacher le mouvement. Tout mouvement dans le plan frontal par rapport à l’opposant lui sera facilement perceptible. Dans son axe antéropostérieur, la perception sera plus tardive. Cela implique que le centre de gravité doit avoir un déplacement strictement horizontal.
Si on reprend le cas de la figure 3, en avançant le centre de gravité (G) va perdre de la hauteur. Il est en rotation autour de la cheville et les membres supérieurs étant tendu ils ne peuvent pas compenser avant que G ne passe à la verticale d’une ligne passant par les articulations métatarso-phalangienne. Pour éviter cela il faut démarrer avec les genoux fléchis. En se tendant les genoux vont pouvoir compenser la perte de hauteur durant l’avancée du centre de gravité.
DESEQUILIBRE
On va définir le déséquilibre comme l’incapacité à conserver la hauteur de G. cela apparaît quand la composante verticale de R ne compense plus P. Notre corps est normalement en capacité de faire générer au sol une Résistance au moins égale au poids. Donc on est sur de rester en équilibre tant que G reste à l’aplomb du point d’appui, c’est à dire tant que G se projette au sol dans le polygone de sustentation (surface dessinée par les pieds et l’espace entre eux dans ce cas).
 Si la projection de G ce fait en dehors du polygone de sustentation, R est forcement oblique. Cela génère une accélération de G et donc son déplacement, augmentant d’autant plus l’obliquité de R, ainsi que l’accélération de G.
Si la projection de G ce fait en dehors du polygone de sustentation, R est forcement oblique. Cela génère une accélération de G et donc son déplacement, augmentant d’autant plus l’obliquité de R, ainsi que l’accélération de G.
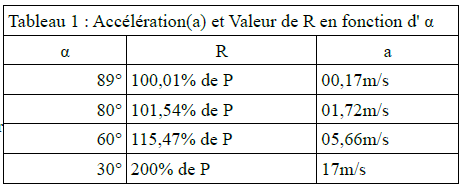
Plus R est oblique plus il faut qu’il augmente pour avoir une composante verticale compensant le poids P (tab. 1).
Il arrivera donc un moment ou le corps ne sera plus en capacité de faire générer assez de résistance R au sol pour compenser P. Il faudra alors modifier notre polygone de sustentation pour modifier le point d’application de R et ainsi le redresser. Il faut avancer un pied.
En avançant le pied nous allons commencer par réduire notre polygone de sustentation. Celui-ci ce réduit à la surface occupée par notre seul pied d’appui. Hors sans préparation G ce projetant entre les deux pieds en appui bipodal, il se projette hors du nouveau polygone en appui unipodal. Ce qui génère une accélération vers le côté, ce qui va déplacer le corps sur le côté(fig.7).
Pour gérer cela nous avons deux solutions :
- Anticiper en déplaçant G à l’aplomb du pied d’appui avant de déplacer l’autre pied.
- Compenser au retour de l’appui du pied qui c’est avancé en générant une accélération équivalente.

Figure 7 : accélération transversale
Sans anticipation
Avec anticipation
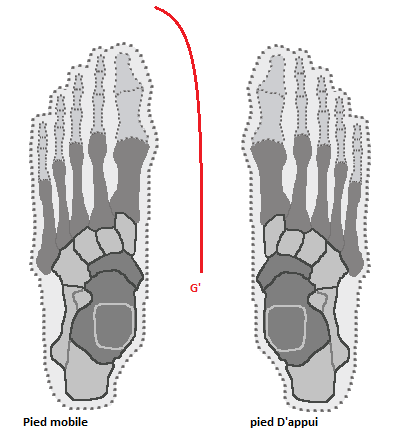
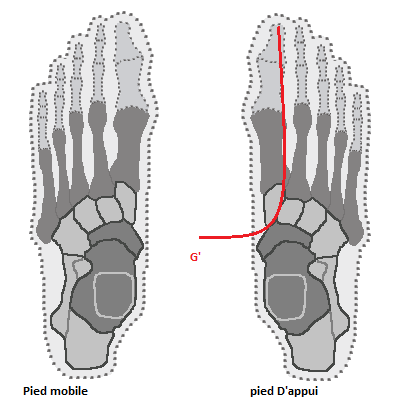
Figure 8 : Déplacement de G du démarrage à la phase d’appui unipodal.
En fonction de la stratégie utilisée, soit le corps se déplace vers le pied d’appui au début du mouvement, soit le corps se déplace vers le pied mobile au cours du mouvement (fig.8). En se replaçant dans un contexte martial, on voit que la stratégie de déplacer le centre de gravité au dessus du point d’appui va donner très tôt l’information du mouvement à l’adversaire. Elle ne semble pertinente que si elle est appliquée précocement avant que l’intention du mouvement n’arrive. L’autre stratégie va permettre d’être perçu plus tardivement, et permet de choisir le pied d’appui qu’au dernier moment.
Olivier